this is designed for the about link on the homepage to auto expand
Moment of Inertia
Introduction
What does the moment of inertia do? This demo with a virtual wheel should explain to you how it affects motion. I have it set up so there's a constant torque acting on the object, and you can move the slider to simulate the body's moment of inertia changing. Be sure to reset after putting the slider at a new value.
Moment of Inertia Demo
You might have seen that the higher the moment of inertia, the harder it is to rotate the object. This makes the moment of inertia much like mass in this regard, but mass isn't the only part of it! Instead, the moment of inertia is actually affected both by mass itself and how that mass is distributed in a rigid body. Thus, two objects with the same mass may have different moments of inertia!
Definition
The most technical definition for the moment of inertia is that it is the second moment mass. You probably don't remember this, but I briefly mentioned that the center of mass is the first moment of mass (normalized by total mass), which may lead you to see a pattern. In any case, the formula for the moment of inertia of a point object of mass $m$ at a distance $r$ from the axis of rotation can be given by:
$$ I = mr^2$$ Now, this is useful if you have objects that can be treated like point masses. However, most of the time we have rigid objects, which means we need to sum over all of the moments of inertia within. This can be written as a summation:
$$ I = \sum m_i {r_i}^2 $$ This definition is a bit clunky and difficult to understand, so I'll break it down. Essentially, you look at each point on the object and note how far it is from the center of rotation. Then, you add up each individual point object. Yes, the actual process inherently requires calculus, but this method of summations can work for a combination of many point objects.
Let's try this technique for the simplest example. You won't actually have to do any calculation if you realize what's being asked. This shape is the simplest possible in terms of moment of inertia, and for all others calculus is required to derive their moments of inertia.
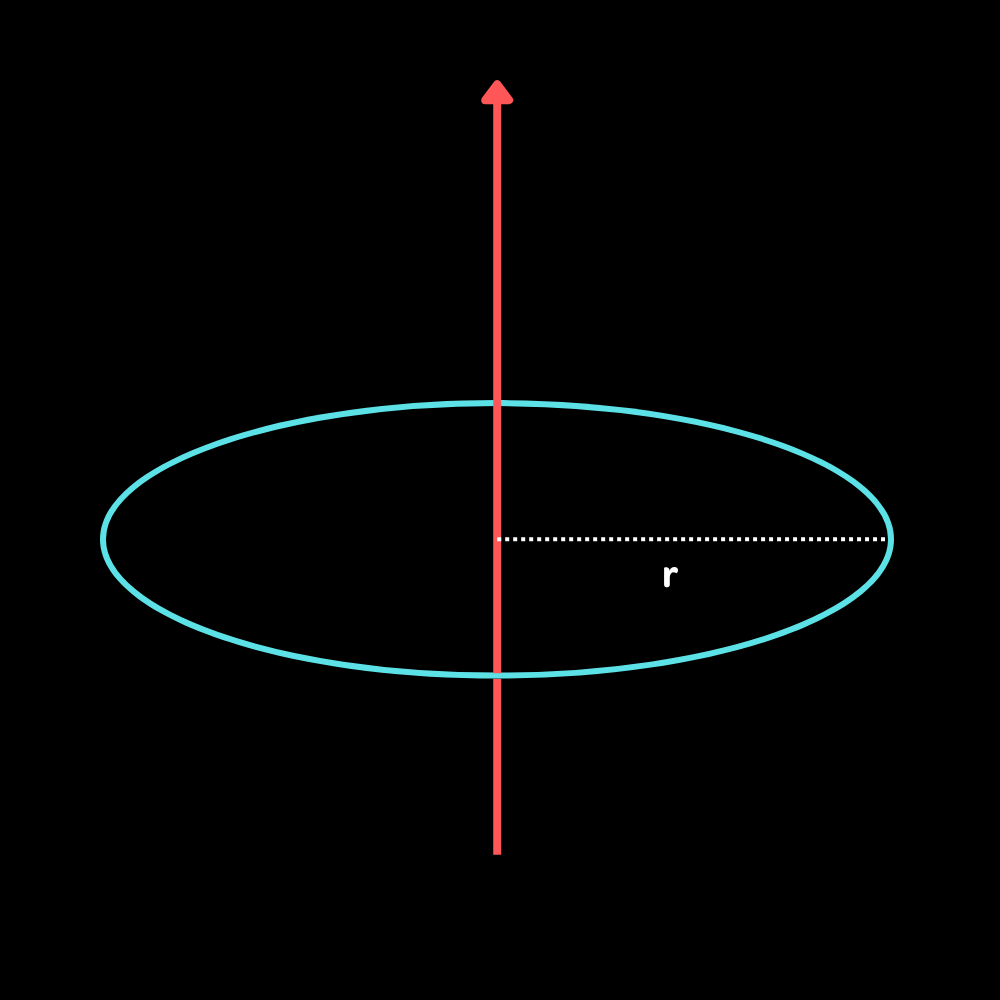
What is the moment of inertia of a thin hoop (mass $m$, radius $r$) about an axis through its center of mass and perpendicular to it?
Figure 1: The hoop, a very simple object. We consider the hoop as infinitely thin, meaning it is just a collection of points located a distance $r$ from the center of the ring. It has no thickness, so we can consider all of the hoop's mass as being contained in its rim. Even if real-world objects aren't infinitely thin, we can usually approximate them to be if they are thin enough.
The rim is located a constant distance $r$ from the center, which allows us to conclude:
$$\bbox[3px, border: 0.5px solid white]{I = mr^2} $$ The rotating ring is equivalent to a rotating point mass! We typically don't think of them as rotating the same way, but that's because while gravity effectively acts at the center for a ring (which causes no torque), while it acts at the point mass's location in that case (which usually does cause a torque). We need a combination of many concepts to effective analyze rotation.
Of course, we can also use an integral in this case. Instead of writing a summation, we write something similar to the integral we had for center of mass:
$$ I = \int r^2 dm $$ A few key differences are present here as opposed to center of mass. For one, the moment of inertia doesn't care about direction and the $r$ is not treated as a vector, mainly because it's squared. Therefore, we don't have to consider position $r$ as a vector when setting up the integral. Otherwise, the approach is pretty much the same. The formula for the moment of inertia of a very small point object is very simple. It considers the mass $m$ of the object and the distance of the object from the axis of rotation $r$.
$$ I = mr^2$$ This definition is deceptively simple. While yes, it is very accurate, it only accounts for points. To find the moment of inertia of rigid bodies like disks, spheres, or cylinders, we need to sum over every single point in an object to find the total moment of inertia. This is no small feat and requires calculus, so for the most part we'll skip over this.
There is one notable example that can be done with clever reasoning, without having to invoke any complex math.
What is the moment of inertia of a very thin hoop (mass $m$, radius $r$) about an axis through its center of mass and perpendicular to it? You can assume the hoop is just made up of a ring of point masses.
Figure 1: The hoop, a very simple object. We consider the hoop as infinitely thin, meaning it is just a collection of points located a distance $r$ from the center of the ring. It has no thickness, so we can consider all of the hoop's mass as being contained in its rim.
The entire rim is located a constant distance $r$ from the center, which allows us to conclude that each point has the same moment of inertia. Moreover, the entire mass $m$ of the object is at a distance $r$ from the axis of rotation, letting us write:
$$\bbox[3px, border: 0.5px solid white]{I = mr^2} $$ The rotating ring is equivalent to a rotating point mass! We typically don't think of them as rotating the same way, but that's because while gravity effectively acts at the axis of rotation for a ring (which causes no torque), while it acts at the point mass's location in that case (which usually does cause a torque, because the point mass isn't usually at the axis of rotation!).
You can see that one concept isn't enough to describe the full picture. We need to combine many to do meaningful analysis.
Before we talk about the moments of inertia of common objects, we should establish a solid conceptual baseline for what affects moment of inertia. We need to know how each part of the formula functions.
Factors That Affect Moment of Inertia
We have seen the definition of moment of inertia as being proportional to mass and radius squared. This is true in general, and for all objects the general form is followed, just with some numerical factor added in front. In our analysis, we will ignore the effect of mass on the moment of inertia since we know that adding mass increases it and vice versa. Thus, we can write:
$$ I \propto r^2 $$ Recall that this definition really is applied to each point mass, not just the entire object. Therefore, we see that moment of inertia is greater when more parts of the object are at a greater radius from the axis of rotation. This is what I meant when I said moment of inertia is affected by how mass is distributed within an object. Objects with more mass distributed closer to the edges of the material will tend to have a greater moment of inertia than similar objects that have a more uniform distribution.
As a simple example, the moment of inertia of a solid, thin disk is less than that of a hoop with the same mass and radius because the disk has more of its mass distributed closer to the center of rotation, while the hoop has all of it at the maximum distance $r$ from the axis.
Another somewhat unrelated idea is that liquids tend to contribute very little, which we approximate as nothing, to the moment of inertia when rotating about their center of mass. If you spin a can full of juice around its center, the can moves but the liquid inside tends to stay level, which is evidence that it isn't really rotating. However, liquids can still contribute a nontrivial amount of moment of inertia under some situations. We have seen that the formula for the moment of inertia is directly related to the distance of each point mass within a rigid object. This means that if more mass is concentrated around the outer edges of the material, the moment of inertia will be greater because more of the mass is located further away from the axis of rotation.
Even if the actual radius of the object isn't changed, the moment of inertia will increase depending on how mass is distributed. This is why a hoop has a greater moment of inertia than a solid disk of the same mass and radius, because the hoop has all of its mass distributed at its edges while the disk has it uniformly distributed, with some being closer to the axis of rotation.
Now that we have an understanding of the factors outside of total mass that affect moment of inertia, I will propose a practice problem in order to test your understanding of this topic. These questions are purely conceptual and do not require significat calculations to solve.
Which would have a greater moment of inertia: a thin pipe or a thick pipe of the same mass and radius?
Answer: The thin pipe, because it has more of its mass distributed at a greater distance from the center.
Which mode of rotation for a long, thin rod has a greater moment of inertia: about its center or about its end?
Answer: Spinning about its end produces a greater moment of inertia because the maximum distance from the axis of rotation becomes the entire length of the rod. If it was about its center, then the max distance would only be half of the length.
Consider a hoop of mass $m$ and radius $r$. Now, we double the radius of the hoop but halve its mass. What happens?
Answer: The moment of inertia is doubled, since it directly depends on mass and the square of the radius.
A fly lands on the edge of a CD player and begins to walk towards its center. How does the moment of inertia of the CD change?
Answer: It decreases, because the distance of the fly from the center is steadily decreasing.
You must memorize the moments of inertia of the common objects! They are rarely provided to you, and they should be common knowledge. Thankfully, these expressions are not awfully complex and can be pretty easily memorized with practice. The shapes in question are also relatively simple ones, like cylinders, rods, and spheres. For the later chapters, I will not provide the moments of inertia of these objects.
Common Moments of Inertia
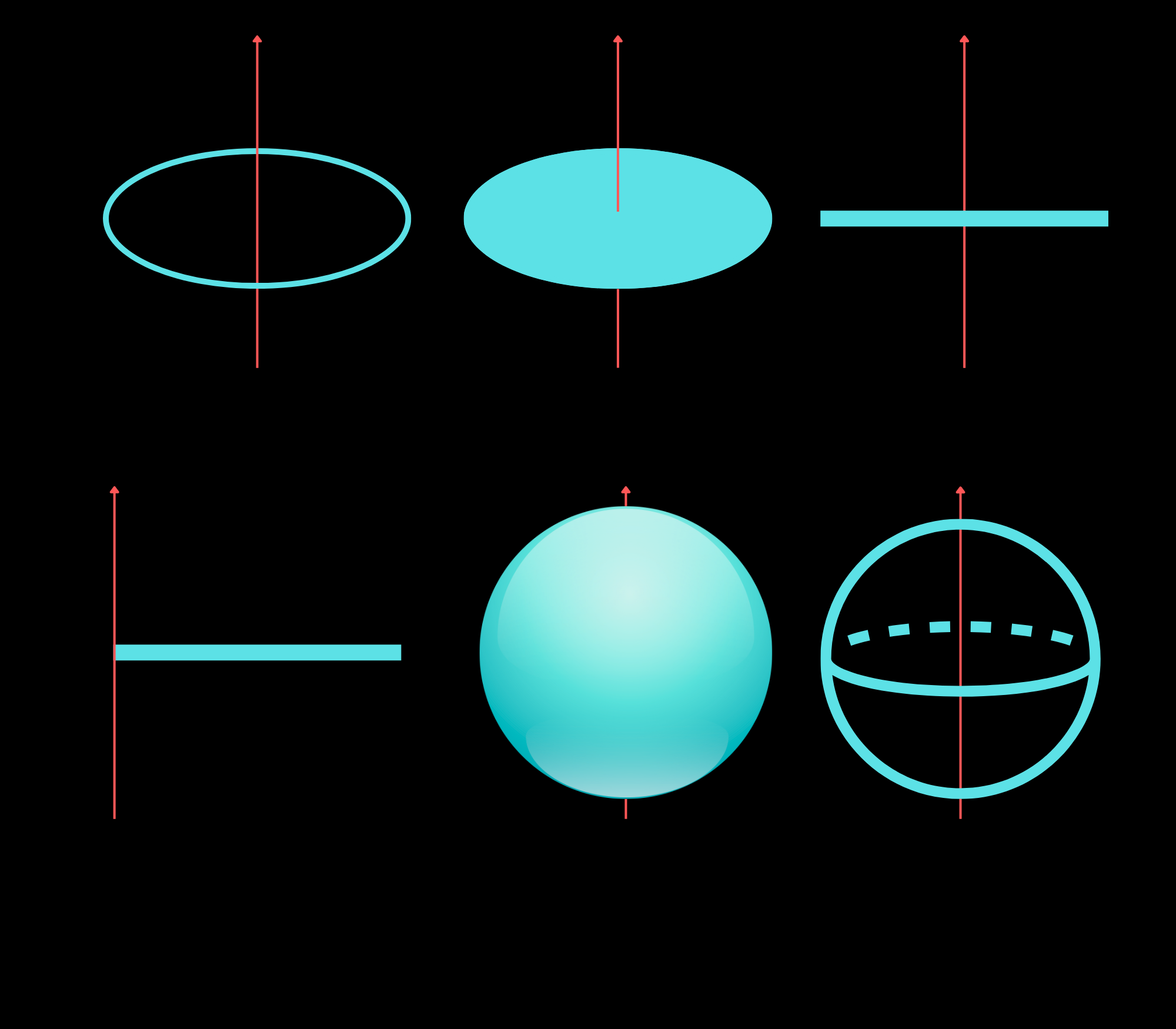
Let's start by diagramming the different shapes we're going to be dealing with, as well as the axes of rotation that we care about.
Figure 2: The most important objects for rotation. We're starting from the top left and going by rows until we cover all six shapes.
The first shape may look familiar to you. It's the hoop from earlier! We already know the formula for it:
$$ I = MR^2 $$ This actually applies to a long, hollow cylinder as well. That's because the moment of inertia formula accounts for distance from the axis of rotation, and the axis is a long line. Thus, for a cylinder the cross-sectional shape would be the same, and the moment of inertia would also be the same. The distance from the axis to the walls of the cylinder is the same as for a hoop.
The second shape is the solid disk. It has been talked about briefly before, but we haven't talked about its actual moment of inertia. The calculus for this one is simple, so we'll do it as an example. The mass is $M$, and the radius is $R$.
Consider integrating outwards from the center in thin rings of thickness $dr$. Each ring has some mass that can be found due to the fact that the disk is uniform. By using the rules of density, we find that the mass $dm$ of each individual ring can be written as:
$$dm = \dfrac{M}{\pi R^2} 2\pi r dr $$ Remembering our definition for how to find the moment of inertia, we can write:
$$ I = \int r^2 dm = 2 \pi \dfrac{M}{\pi R^2} \int r^3 dr $$ Now, we just integrate from $r = 0$ to $r = R$ and we will get our answer.
$$ I = \dfrac{2M}{R^2}\left[ \dfrac{r^4}{4}\right] |_0^R $$ The moment of inertia of a solid disk is less than that of a thin hoop, as expected. In fact, it is exactly half of that for a hoop of the same radius and mass:
$$ I = \dfrac12 MR^2 $$ Like the thin ring and hollow cylinder, the thin disk and the solid cylinder share the formula above for the same reason. I find that the hollow cylinder is a little less common, but the solid cylinder is a very commonly used shape. It's also a shape you'll see often in the real world.
Our next shape is the thin rod rotated about its center. For this one, we usually use $L$ to denote the entire length of the rod. It's possible to derive the formula for this one as well relatively simply, but I'll leave this for you to do on your own if you're interested.
$$ I = \dfrac{1}{12} ML^2 $$ This result technically only works for an infinitely thin (one-dimensional, to be precise) rod, but when an object is thin enough we usually use this as a good enough approximation.
Next is the same rod, rotated about one of its ends. As you would expect, the moment of inertia is much greater for this case. It's what we explained in the question back on the previous page, after all!
$$ I = \dfrac13 ML^2 $$ The next two shapes see us returning to circular-ish objects. However, spheres and circles are only similar, not identical! First, we have the solid sphere of radius $R$ rotated about a diameter. The moment of inertia of this shape is equal to:
$$ I = \dfrac{2}{5} MR^2 $$ This is the smallest factor in front of $MR^2$ that you'll see in this list, and it's because a solid sphere has a lot of its mass concentrated closer to the center than the other shapes on this list.
Next is our spherical shell of radius $R$. It might look superficially similar to the solid sphere, but it is completely hollow, only being a very thin shell. Its moment of inertia is larger than that of the solid sphere as you would expect, and equal to:
$$ I = \dfrac{2}{3} MR^2 $$ The first shape may look familiar to you. It's the hoop from earlier! We already know the formula for it:
$$ I = MR^2 $$ The second shape is the solid disk. It has been talked about briefly before, but we haven't talked about its actual moment of inertia. It's actually exactly half the moment of inertia of a thin hoop of the same mass and radius:
$$ I = \dfrac12 MR^2 $$ Our next shape is the thin rod rotated about its center. For this one, we usually use $L$ to denote the entire length of the rod.
$$ I = \dfrac{1}{12} ML^2 $$ Next, the same rod is rotated about its end. You should recall that we said the moment of inertia should be larger.
$$ I = \dfrac13 ML^2 $$ Next, we have the solid sphere of radius $R$ rotated about a diameter. The moment of inertia of this shape is equal to:
$$ I = \dfrac{2}{5} MR^2 $$ This is the smallest multiplier in front of $MR^2$ that you'll see in this list, and it's because a solid sphere has a lot of its mass concentrated closer to the center than the other shapes on this list.
Finally, we have the same sphere but hollow. As with the solid disk and hoop, the hollow shell has a much greater moment of inertia.
$$ I = \dfrac{2}{3} MR^2 $$ That's all of the shapes that you need to know the moments of inertia for! Here's a concise chart with each shape and its moment of inertia for easy reference. I know you'll probably be needing it until you memorize all of them.
Object
Moment of Inertia ($I$)
Ring / Hollow Cylinder
$ MR^2 $
Disk / Solid Cylinder
$\dfrac12 MR^2$
Rod (about center)
$\dfrac{1}{12}ML^2$
Rod (about end)
$ \dfrac{1}{3} ML^2$
Solid Sphere
$\dfrac{2}{5} MR^2$
Hollow Sphere
$\dfrac{2}{3} MR^2$
We're not quite done just yet. See, we need to talk about how moment of inertia changes with a choice of rotation axis. There are a few different results that are useful for finding moment of inertia through an axis that isn't the conventional one.
Parallel Axis Theorem
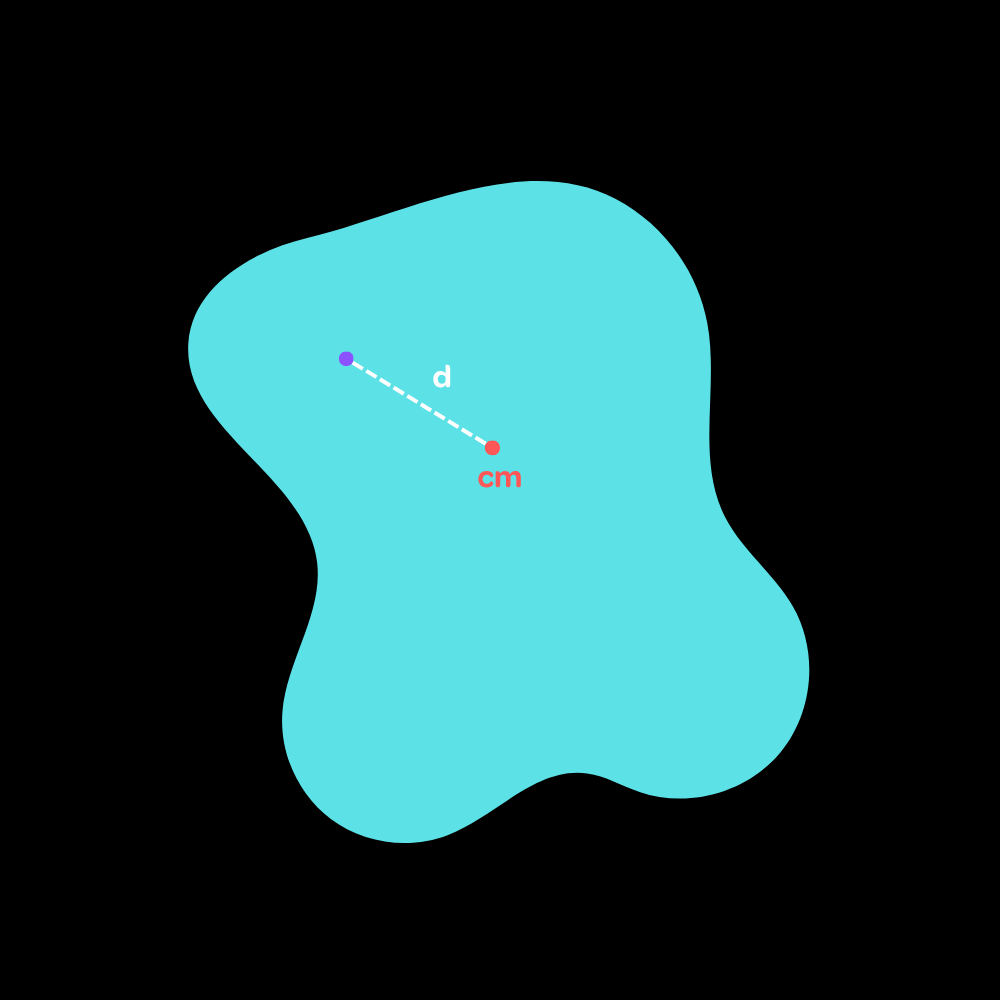
The first of these is the parallel axis theorem. This allows us to find the moment of inertia of an object about an axis that is parallel to the one through the center of mass. It is relatively simple. We'll define the center-of-mass inertia as $ I_{cm} $, the new moment of inertia as $ I$, the mass as $M$ and the distance that the new axis is from the center of mass as $d$.
$$ I = I_{cm} + M d^2 $$ Figure 3: The parallel axis theorem. This theorem implies that the axis through the center of mass is the axis where the moment of inertia is least, since an additional term of $Md^2$ is added for any other axis. We can then conclude that objects that are sent spinning without any constraints on their rotation will rotate about their center of mass since in that case the moment of inertia will be the least through that axis. Nature tends to want to minimize things (think back to potential energy), and this is no exception.
There is a way to derive this theorem using a bit of basic calculus combined with some clever logic. We can write the moment of inertia through an arbitrary axis parallel to the center-of-mass axis as an integral. We will define the distance to the axis as $r'$, distance to the center of mass as $r_{cm}$, and distance between the axes as $d$.
$$ I' = \int {r'}^2 dm $$ We can re-write $r'$ in terms of other variables. Everything is technically a vector here, but I have just neglected to put vector arrows on them. According to vector addition rules, $r' = r_{cm} + d$, so we put this into our equation, remembering that $d$ is a constant.
$$ I' = \int (r_{cm} + d)^2 dm = \int {r_{cm} }^2 dm + 2d\int r_{cm} dm + d^2 \int dm $$ Now, it's time for analysis. The first integral is actually just the center of mass moment of inertia $I_{cm}$ if you look at it, since it only accounts for distance from the center of mass. The second term is an integral for center of mass, but we're considering distance from the center of mass to it, which means it will inevitably evaluate to zero. The final integral is just the total mass of the object. Thus, we have:
$$ I' = I_{cm} + Md^2 $$ We just proved the result!
This theorem is quite commonly seen and used in quite a variety of cases. It's mostly applied to the six objects that we already know the moments of inertia of, in situations where the axis of rotation is slightly deflected off-center.
We first have the parallel-axis theorem, which does exactly what it sounds like. It lets us find moments of inertia through axes that are parallel to the center-of-mass rotational axis. This is actually incredibly useful, as it means we don't have to "derive" the moment of inertia for every new rotational axis.
The moment of inertia $I'$ through the new axis is expressed in terms of the center-of-mass inertia $I_{cm}$, the object's mass $M$, and the distance of the new axis from the center of mass $d$. The relation is pretty simple:
$$ I' = I_{cm} + Md^2 $$ Figure 3: The parallel axis theorem. The theorem mostly applied to the six objects that we already know the moments of inertia of, in situations where the axis of rotation is not where it usually is. A simple example is coming right up.
Show that the moment of inertia for a uniform rod of mass $M$ and length $L$ rotated about its end is $I = \frac{1}{3}ML^2$, given that the moment of inertia for the rod about its center is $I = \frac{1}{12}ML^2$. (I gave you the moments so you don't just write down the answer. You need to show that this is true!)
What we essentially have here is an application of the parallel-axis theorem. The distance between the axis through the center of mass and the axis through one end is half the length of the rod, $d = L/2$. We can then just plug this into the formula.
$$ I = \dfrac{1}{12} ML^2 + M \left( \dfrac{L}{2}\right)^2 = \dfrac{1}{12} ML^2 + \dfrac14 ML^2$$ $$ \bbox[3px, border: 0.5px solid white] {I = \dfrac13 ML^2} $$ That's all you need to do!
There is one small thing to keep in mind. If you want to find the moment of inertia about an axis not through the center of mass but are given the moment of inertia through another axis that is parallel to it but doesn't pass through the center of mass, then you need to find the center of mass inertia $I_{cm}$ first by using the theorem, then use the theorem again to find the new inertia. You cannot just directly use the distance between the two axes, because neither of them is the center-of-mass axis in that case.
Perpendicular Axis Theorem
There is another theorem, but it is a bit more advanced and much less common. It takes the name of perpendicular axis theorem, and as you might expect it describes axes that are perpendicular to each other.
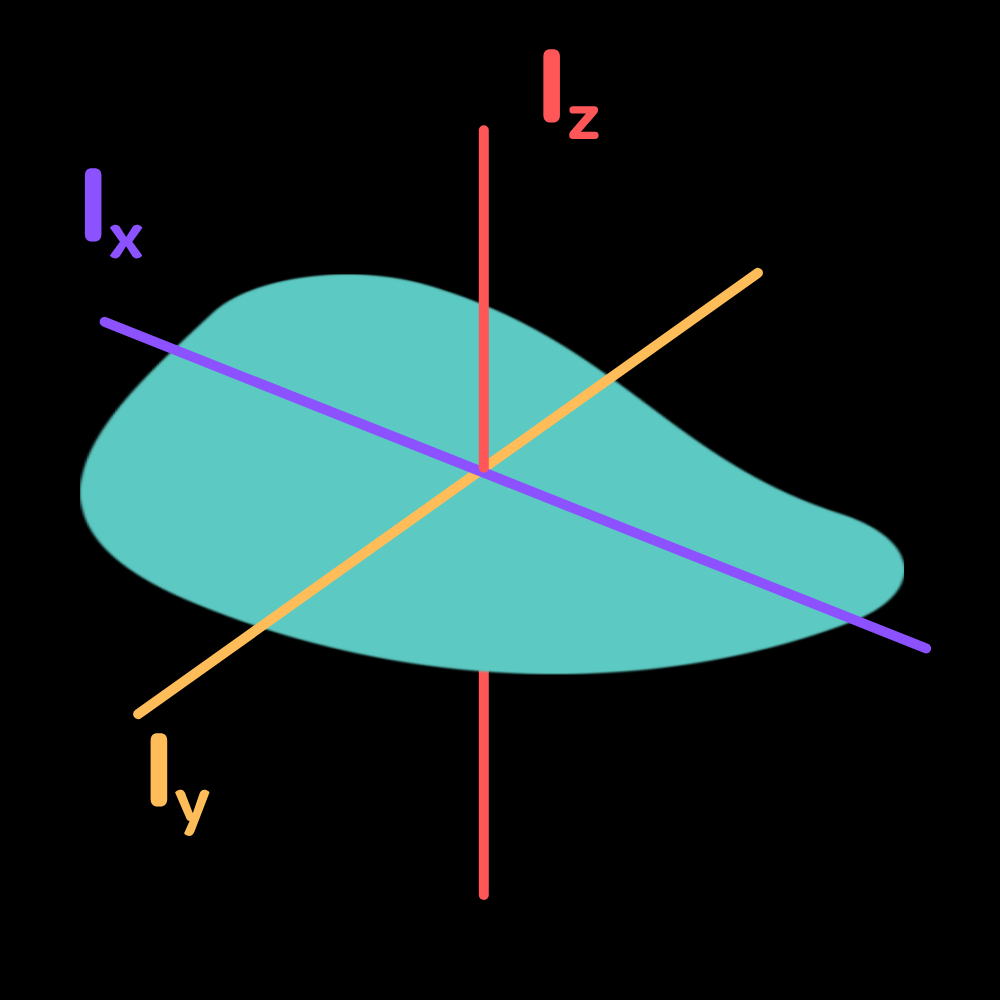
The axis hinges on the idea of three moments of inertia about three axes: the x-direction axis $I_x$, y-direction axis $I_y$, and z-direction axis $I_z$. These directions are defined with the z-direction being perpendicular to the plane of the object in question, while the other two follow standard coordinate axis rules. The object must also be planar (flat) for us to apply the theorem.
The relationship between the three inertias is as follows:
$$ I_z = I_x + I_y $$ Figure 4: The perpendicular axis theorem. This theorem is relatively simple, so we'll jump straight into a short example problem to demonstrate how it works.
What is the moment of inertia of a disk through an axis that lies in the plane of the disk and runs through its center of mass?
This problem requires some of your imagination, as well as our old friend symmetry. The axis is in the plane of the disk, meaning it runs through its middle lengthwise. This makes it either $I_x$ or $I_y$ in our formula, and we know that $I_z = \dfrac12 MR^2$. But which one is it?
Symmetry comes to save the day. It can be either, because the circle has a very high degree of symmetry! If we draw an axis in the same plane of the circle but perpendicular to our original one, it will essentially be the same as our original axis. Therefore, $I_x = I_y$, and we can write:
The moment of inertia should not be a foreign concept to us anymore. You might not have thought of it before, but with some experimentation and explanation it becomes obvious that it does exist and affects rotation. For instance, if you've ever tried to swing a stick about its end, you know it's harder than swinging it around its middle. Now you know why!
Next, we need to unify the ideas we've learned in the past few lessons into the rotational equivalent of a Newton's Laws unit, where we convert the laws of motion into the laws of rotational motion. It's the place where everything I've talked about falls into place and we can start to actually tackle complex problems involving rotation. Without further ado, get ready to get rotated off your feet! (Bad joke, I know.)